Air adalah kebutuhan pokok setiap manusia, dan pengelolaan air menjadi salah satu aspek penting dalam kehidupan sehari-hari, baik di rumah, laboratorium, maupun fasilitas umum. Selama ini, sistem penyaluran air umumnya masih mengandalkan pompa manual yang dioperasikan dengan menekan saklar atau tombol. Sistem manual ini memiliki beberapa kelemahan:
Risiko kontaminasi: Saklar pompa menjadi titik sentuh yang berpotensi menyebarkan kuman atau virus, terutama di fasilitas kesehatan, laboratorium, atau dapur umum.
Kurangnya efisiensi: Tanpa kendali otomatis, pompa bisa menyala terlalu lama atau digunakan secara berlebihan, menyebabkan pemborosan air.
Ketidaknyamanan: Pengguna harus menyentuh saklar dalam kondisi tangan kotor atau basah, yang tidak higienis dan merepotkan.
Seiring berkembangnya teknologi, khususnya Internet of Things (IoT) dan sistem otomatisasi nirsentuh, berbagai inovasi mulai diterapkan untuk mengatasi permasalahan ini. Otomatisasi nirsentuh memungkinkan perangkat untuk beroperasi tanpa kontak fisik langsung, meningkatkan higienitas, efisiensi, dan kemudahan penggunaan.
Sejarah dan Tren Otomatisasi Nirsentuh:
2010–2015: Sistem contactless awal menggunakan sensor resistif atau proximity sederhana, namun memiliki keterbatasan jangkauan dan membutuhkan bahan konduktif tertentu.
2016–2020: Sensor inframerah mulai populer untuk deteksi tangan dan objek, tetapi sering terganggu oleh cahaya sekitar, sehingga akurasinya kurang konsisten.
2021–sekarang: Sensor ultrasonik seperti HC-SR04 menjadi pilihan utama karena keakuratan tinggi, stabil di berbagai kondisi lingkungan, dan mampu mengukur jarak objek secara presisi ±1 cm.
Sensor ultrasonik bekerja dengan prinsip Time of Flight (ToF) gelombang suara, yang menghitung jarak berdasarkan waktu yang dibutuhkan gelombang untuk memantul dari objek dan kembali ke sensor. Metode ini bebas interferensi cahaya dan tidak memerlukan kontak fisik, sehingga sangat sesuai untuk aplikasi nirsentuh.
ESP32 dipilih sebagai mikrokontroler karena:
Memiliki Wi-Fi onboard, memudahkan integrasi IoT.
Konsumsi daya rendah dan kompatibel dengan berbagai sensor.
Dapat menjalankan logika kontrol sekaligus mengirim data ke cloud.
Integrasi dengan platform Blynk memungkinkan pengguna untuk:
Memantau status pompa secara real-time.
Menerima notifikasi ketika pompa aktif atau air habis.
Melakukan kendali jarak jauh (override) dari smartphone.
Dengan kombinasi sensor ultrasonik, ESP32, dan Blynk, proyek ini diharapkan menciptakan prototipe pompa air nirsentuh yang higienis, efisien, dan praktis, sekaligus menjadi model implementasi teknologi IoT untuk rumah tangga, laboratorium, dan fasilitas kesehatan
1.2 Rumusan Masalah
Bagaimana merancang arsitektur perangkat keras (hardware) yang optimal agar Sensor Ultrasonik, ESP32, dan Relay dapat beroperasi secara stabil, aman, dan saling terintegrasi dengan baik?
Bagaimana kinerja jaringan Wi-Fi dan server Blynk mempengaruhi latency kendali jarak jauh, serta bagaimana optimasi kode dapat meminimalkan delay?
Bagaimana implementasi sistem nirsentuh ini memengaruhi efisiensi penggunaan air dibandingkan sistem pompa manual, khususnya dalam mengurangi pemborosan?
Bagaimana memastikan stabilitas sistem saat digunakan dalam siklus panjang atau kondisi 24 jam non-stop?
1.3 Tujuan Proyek
Untuk menjawab rumusan masalah, tujuan proyek dibagi menjadi beberapa aspek:
1. Hardware
Mengembangkan prototipe pompa air nirsentuh yang mampu bekerja secara otomatis dengan akurasi ±1 cm.
Memastikan interkoneksi antara sensor, ESP32, dan Relay stabil dan aman.
2. Software
Mengimplementasikan algoritma kontrol (PID sederhana atau Hysteresis Control) untuk memfilter noise pada pembacaan sensor.
Menjamin pompa hanya menyala saat tangan berada dalam jarak ambang yang ditentukan.
3. Integrasi IoT
Menghubungkan ESP32 dengan Blynk Cloud untuk pertukaran data sensor dan perintah kendali.
Menyediakan fitur monitoring real-time dan kendali jarak jauh (override) melalui smartphone.
4. Validasi dan Pengujian
Mengukur waktu respons sistem lokal dan IoT.
Menguji akurasi sensor di berbagai jarak.
Mengevaluasi efisiensi penggunaan air dibanding pompa manual.
5. Dokumentasi dan Publikasi
Menyusun laporan akademik lengkap dengan analisis, grafik, dan tabel pengujian.
Menyediakan kode program yang terdokumentasi dan mudah dipahami.
Menyiapkan prototipe fisik yang dapat dijadikan bahan publikasi atau seminar.
1.4 Manfaat Proyek
Higienitas: Mengurangi kontak fisik, sehingga lebih aman di fasilitas kesehatan, laboratorium, atau dapur umum.
Efisiensi: Pompa bekerja otomatis, mengurangi pemborosan air.
Kemudahan penggunaan: Bisa dioperasikan dengan hanya mendekatkan tangan.
Pengembangan teknologi: Menjadi dasar implementasi IoT dan otomasi nirsentuh di lingkungan akademik maupun industri.
Potensi edukatif: Mahasiswa belajar integrasi hardware, software, dan IoT sekaligus.
BAB II: TINJAUAN PUSTAKA DAN LANDASAN TEORI
2.1. Konsep Dasar Otomatisasi Nirsentuh (Contactless Automation)
Otomatisasi nirsentuh merupakan paradigma desain sistem yang berfokus pada interaksi manusia-mesin tanpa memerlukan kontak fisik langsung. Konsep ini menjadi krusial dalam lingkungan yang menuntut standar kebersihan tinggi (misalnya fasilitas medis atau pemrosesan makanan) serta untuk kenyamanan dan aksesibilitas.
2.1.1. Perbandingan Teknologi Sensor Nirsentuh
Teknologi Sensor
Prinsip Kerja
Kelebihan
Kekurangan
Inframerah (IR) Proximity
Mengukur pantulan sinar inframerah.
Murah, respons cepat.
Sangat dipengaruhi oleh warna/reflektivitas objek; rentan terhadap noise cahaya.
Kapasitif
Mendeteksi perubahan medan elektrostatik.
Sensitif, dapat mendeteksi melalui material non-konduktif.
Jarak deteksi sangat pendek; rentan terhadap kelembaban.
Ultrasonik (HC-SR04)
Mengukur waktu tempuh gelombang suara (ToF).
Akurasi tinggi, tidak dipengaruhi warna/cahaya, jangkauan lebih jauh.
Dipengaruhi oleh suhu dan kelembaban udara; resolusi lebih rendah pada jarak sangat dekat.
📖 BAB II: TINJAUAN PUSTAKA DAN LANDASAN TEORI
2.1. Konsep Dasar Otomatisasi Nirsentuh (Contactless Automation)
Otomatisasi nirsentuh merupakan paradigma desain sistem yang berfokus pada interaksi manusia-mesin tanpa memerlukan kontak fisik langsung. Konsep ini menjadi krusial dalam lingkungan yang menuntut standar kebersihan tinggi (misalnya fasilitas medis atau pemrosesan makanan) serta untuk kenyamanan dan aksesibilitas.
2.1.1. Perbandingan Teknologi Sensor Nirsentuh
Teknologi Sensor
Prinsip Kerja
Kelebihan
Kekurangan
Inframerah (IR) Proximity
Mengukur pantulan sinar inframerah.
Murah, respons cepat.
Sangat dipengaruhi oleh warna/reflektivitas objek; rentan terhadap noise cahaya.
Kapasitif
Mendeteksi perubahan medan elektrostatik.
Sensitif, dapat mendeteksi melalui material non-konduktif.
Jarak deteksi sangat pendek; rentan terhadap kelembaban.
Ultrasonik (HC-SR04)
Mengukur waktu tempuh gelombang suara (ToF).
Akurasi tinggi, tidak dipengaruhi warna/cahaya, jangkauan lebih jauh.
Dipengaruhi oleh suhu dan kelembaban udara; resolusi lebih rendah pada jarak sangat dekat.
Justifikasi Pemilihan: Sensor Ultrasonik HC-SR04 dipilih karena menawarkan kombinasi terbaik antara akurasi pengukuran jarak yang diperlukan untuk mengaktifkan pompa secara spesifik di bawah nozzle dan imunitas terhadap kondisi pencahayaan, yang merupakan kelemahan fatal bagi sistem berbasis IR.
2.2. Tinjauan Penelitian Terdahulu (State of the Art)
Sistem pompa air otomatis telah banyak dikembangkan, namun integrasi nirsentuh dan IoT secara simultan masih terus dioptimasi:
[L. H. Dwianto, 2023] dalam studinya mengenai performa HC-SR04 menekankan bahwa akurasi sensor dapat meningkat melalui implementasi algoritma filtering seperti median filter atau moving average untuk mengatasi spike data yang disebabkan oleh pantulan noise multi-jalur (multipath reflection). Relevansi: Proyek ini akan mengimplementasikan Moving Average Filter untuk memvalidasi peningkatan akurasi sistem.
[D. K. Satria, 2021] membuktikan keberhasilan penggunaan ESP32 dan Blynk untuk kontrol jarak jauh pada sistem manajemen air. Relevansi: Studi ini menjadi landasan bahwa ESP32 mampu menangani real-timemonitoring dan remote control yang diperlukan untuk fungsi override pada pompa.
[T. A. Nugroho, 2018] menginvestigasi aspek higienitas, menyimpulkan bahwa pengadopsian teknologi contactless dapat mengurangi jumlah mikroorganisme pada permukaan kontrol hingga 90% dibandingkan sistem manual. Relevansi: Penelitian ini mendukung klaim manfaat proyek dari sisi higienitas.
2.3. Landasan Teori Komponen Utama
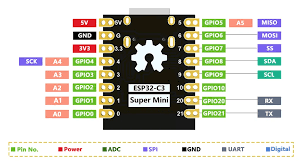
2.3.1. Mikrokontroler ESP32-C3
Mikrokontroler ESP32 adalah pilihan ideal untuk proyek IoT karena spesifikasinya:
Arsitektur: Dual-core Xtensa LX6 32-bit. Keuntungan dual-core memungkinkan satu inti didedikasikan untuk pemrosesan logika kontrol sensor dan inti lainnya untuk tugas komunikasi Wi-Fi/Blynk, yang secara signifikan mengurangi latency dan meningkatkan stabilitas sistem secara keseluruhan.
Konektivitas: Integrasi modul Wi-Fi 802.11 b/g/n (2.4 GHz) dan Bluetooth. Fitur ini menghilangkan kebutuhan akan modul Wi-Fi eksternal, menyederhanakan wiring dan mengurangi konsumsi daya keseluruhan.
Antarmuka: Memiliki berbagai General Purpose Input/Output (GPIO) pins, termasuk dukungan PWM, SPI, I2C, dan ADC/DAC, yang memudahkan interfacing dengan Sensor Ultrasonik dan Modul Relay.
2.3.2. Sensor Ultrasonik HC-SR04
Sensor ini menggunakan gelombang suara dengan frekuensi 40 kHz untuk mengukur jarak secara nirsentuh. Proses pengukuran melibatkan beberapa tahap sinyal digital sebagai berikut:
Pemicuan (Trigger) Mikrokontroler mengirim pulsa HIGH selama 10 µs ke pin Trig pada sensor.
Transmisi Gelombang Ultrasonik Sensor memancarkan 8 siklus gelombang ultrasonik 40 kHz ke arah objek yang akan diukur.
Penerimaan (Echo) Pin Echo menjadi HIGH segera setelah gelombang dikirim, dan tetap HIGH hingga gelombang pantulan kembali diterima oleh sensor.
Pengukuran Durasi Pulsa (t_echo) Mikrokontroler mengukur durasi pulsa HIGH pada pin Echo, yang menunjukkan waktu perjalanan pulang-pergi gelombang suara.
Perhitungan Jarak Berdasarkan waktu perjalanan gelombang suara, jarak objek dapat dihitung. Dengan asumsi suhu udara 20°C, kecepatan suara adalah 343 m/s. Jarak d dalam sentimeter dihitung sebagai:
dcm=2techo(μs)×106(μs/s)343 m/s×100(cm/m)
Atau lebih sederhana:dcm≈58.8techo(μs)
Nilai 58.8 ini merupakan konstanta kalibrasi yang sering digunakan dalam pemrograman untuk konversi waktu pulsa menjadi jarak dalam sentimeter.
2.3.3. Modul Relay dan Pompa DC
a. Modul Relay
Relay 5V 1-Channel (Tipe SPDT / SRD-05VDC-SL-C)
Modul Relay berfungsi sebagai saklar listrik yang memutus atau menyambung aliran daya ke pompa. Karena pompa air DC 12V membutuhkan arus dan tegangan lebih tinggi daripada output GPIO ESP32 (3.3V), relay bertindak sebagai isolator.
Pompa air DC berfungsi sebagai aktuator utama yang mengalirkan air ketika sistem terpicu.
Relay yang digunakan biasanya 1-channel dengan tegangan kendali 5V, tetapi dapat dikendalikan oleh output 3.3V dari ESP32.
Dapat menahan arus AC/DC hingga 10A atau lebih.
Menggunakan mode Normally Open (NO), sehingga jika ESP32 mati atau terjadi gangguan daya, pompa akan otomatis mati (fail-safe), menjamin keamanan sistem.
b. Pompa Air DC
Digunakan pada sistem prototipe ini karena ukurannya kecil, efisien, dan cukup untuk simulasi aliran air nirsentuh. Spesifikasi pompa: 12V, 1A. Terhubung ke relay untuk kendali on/off otomatis melalui ESP32.
2.4. Arsitektur Komunikasi Internet of Things (IoT)
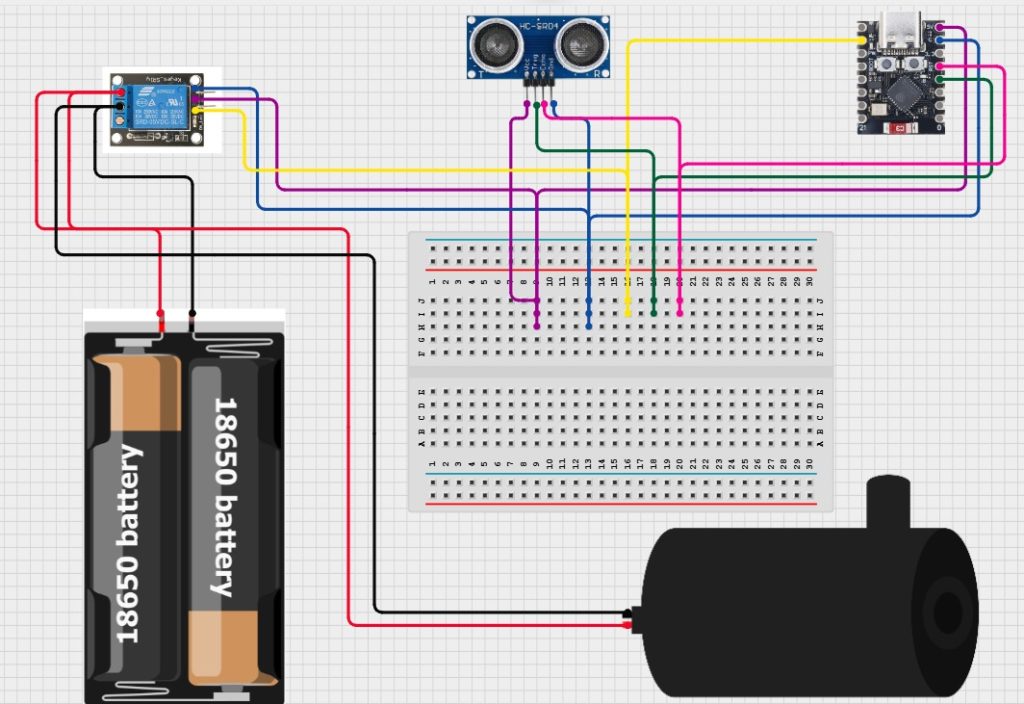
BERIKUT ADALAH GAMBARAN RANGKAIAN DARI TUGA SBESAR KAMI, YAITU SISTEM POMPA AIR OTOMATIS SEBAGAI SOLUSI OTMATISASI NIRSENTUH MENGGUNAKAN SENSOR ULTRASONIK
2.4.1. Protokol Komunikasi IoT Blynk
Blynk menggunakan protokol HTTP/RESTful API dan library yang menyediakan abstraksi dari protokol tingkat rendah (seperti MQTT, yang sering digunakan untuk komunikasi IoT). Hal ini mempermudah implementasi prototyping. Komunikasi data antara perangkat keras dan server Blynk bersifat asinkron, yang artinya ESP32 dapat terus menjalankan tugas lokalnya (membaca sensor dan mengendalikan pompa) tanpa harus terhenti menunggu respons dari server Blynk.
2.4.2. Implementasi Remote Control (Override)
Fitur Override adalah keunggulan kunci IoT. Ini diimplementasikan melalui Virtual Pin (V1) yang dihubungkan ke tombol switch di aplikasi Blynk:
Ketika tombol Blynk (V1) diubah statusnya, perintah dikirim ke ESP32.
ESP32 menerima perintah ini melalui fungsi BLYNK_WRITE(V1).
Jika override aktif (misalnya V1=HIGH), logika utama sensor dapat dinonaktifkan sementara, dan pompa dikendalikan murni oleh perintah jarak jauh.
Fitur ini sangat berguna untuk debugging, pengujian jarak jauh, atau dalam situasi darurat ketika sistem sensor lokal mengalami masalah.
📖 BAB III: METODOLOGI PERANCANGAN DAN PELAKSANAAN
Metodologi ini menjabarkan langkah-langkah sistematis yang akan ditempuh dalam merancang, membangun, mengintegrasikan, dan memvalidasi Sistem Pompa Air Otomatis Nirsentuh. Proses dibagi menjadi tiga fase utama: Perancangan Sistem, Implementasi, dan Pengujian & Evaluasi.
3.1. Fase I: Perancangan Sistem (Desain Arsitektur)
3.1.1. Diagram Blok Fungsional
Diagram blok berfungsi sebagai peta jalan fungsional, menunjukkan hubungan logis dan arah aliran data antar komponen sistem.
Input (Sensor): Sensor Ultrasonik HC-SR04 menangkap data jarak.
Proses (Mikrokontroler): ESP32 memproses data jarak, menjalankan algoritma kontrol, dan mengelola koneksi Wi-Fi ke Blynk.
Output (Aktuator): Modul Relay bertindak sebagai saklar yang dikontrol oleh ESP32 untuk menghidupkan atau mematikan Pompa Air DC.
Komunikasi (IoT): Komunikasi dua arah dengan Blynk Cloud untuk monitoring dan remote control.
3.1.2. Analisis Kebutuhan Daya dan Level Tegangan
Kebutuhan daya dan kesesuaian tegangan adalah krusial untuk mencegah kerusakan komponen.
Komponen
Tegangan Operasi
Tegangan Kontrol
Arus Puncak Estimasi
Catatan
ESP32
3.3 V (Regulated)
–
~500 mA (saat transmit Wi-Fi)
Memerlukan suplai stabil dari regulator 5 V atau USB.
HC-SR04
5 V
3.3 V (logika kompatibel)
~15 mA
Sensor bekerja pada 5 V dan menerima sinyal kontrol dari ESP32.
Relay Module
5 V (Coil Power)
3.3 V (Sinyal Kontrol)
~70 mA
Membutuhkan daya coil 5 V, dikendalikan melalui logika 3.3 V dari ESP32.
Pompa Air DC
12 V
–
1 A – 1.5 A (beban penuh)
Aktuator utama, membutuhkan suplai daya terpisah dari rangkaian kontrol.
Solusi Distribusi Daya
Untuk memenuhi kebutuhan daya seluruh sistem secara aman dan stabil, digunakan Adaptor 12 V 2 A sebagai sumber daya utama. Tegangan ini kemudian diturunkan menggunakan Step-Down Voltage Regulator (LM2596) dengan konfigurasi berikut:
12 V → 3.3 V Untuk menyuplai ESP32 agar mendapatkan tegangan yang stabil dan sesuai spesifikasi..
12 V → 5 V Untuk menyalakan Relay dan HC-SR04.
3.2. Fase II: Implementasi dan Perakitan
3.2.1. Perakitan Perangkat Keras (Hardware Interfacing)
Perakitan perangkat keras dilakukan dengan menghubungkan seluruh komponen utama, yaitu sensor ultrasonik, ESP32, modul relay, dan pompa air DC, sesuai kebutuhan sistem. Rincian koneksi dijelaskan sebagai berikut:
1. Koneksi Sensor Ultrasonik (HC-SR04)
Trig Pin HC-SR04 → GPIO 4 (ESP32)
Echo Pin HC-SR04 → GPIO 5 (ESP32)
VCC → 5 V (Regulated Power)
GND → Ground Sistem
Konfigurasi ini memastikan sensor menerima suplai daya yang stabil serta dapat mengirim dan menerima sinyal jarak secara akurat melalui GPIO ESP32.
2. Koneksi Aktuator (Modul Relay)
Pin Sinyal Relay → GPIO 2 (ESP32)
VCC Relay → 5 V (Regulated Power)
Terminal NO (Normally Open) Relay → Disusun seri pada jalur positif 12 V menuju pompa air DC
Relay berfungsi sebagai saklar elektronik yang menghubungkan sumber daya 12 V ke pompa air ketika ESP32 memberikan sinyal logika HIGH melalui GPIO 2.
3. Mekanikal dan Enclosure
Seluruh komponen dipasang pada casing ABS untuk melindungi rangkaian dari lingkungan luar serta menjaga kerapian modul. Sensor ultrasonik ditempatkan pada posisi:
Menghadap vertikal ke bawah
Berada ± 1 cm di atas nozzle air
Penempatan ini bertujuan untuk mengurangi noise pantulan permukaan air dan memastikan area deteksi tetap fokus pada tangan atau objek yang didekatkan.
3.2.2. Perancangan Perangkat Lunak (Software Development)
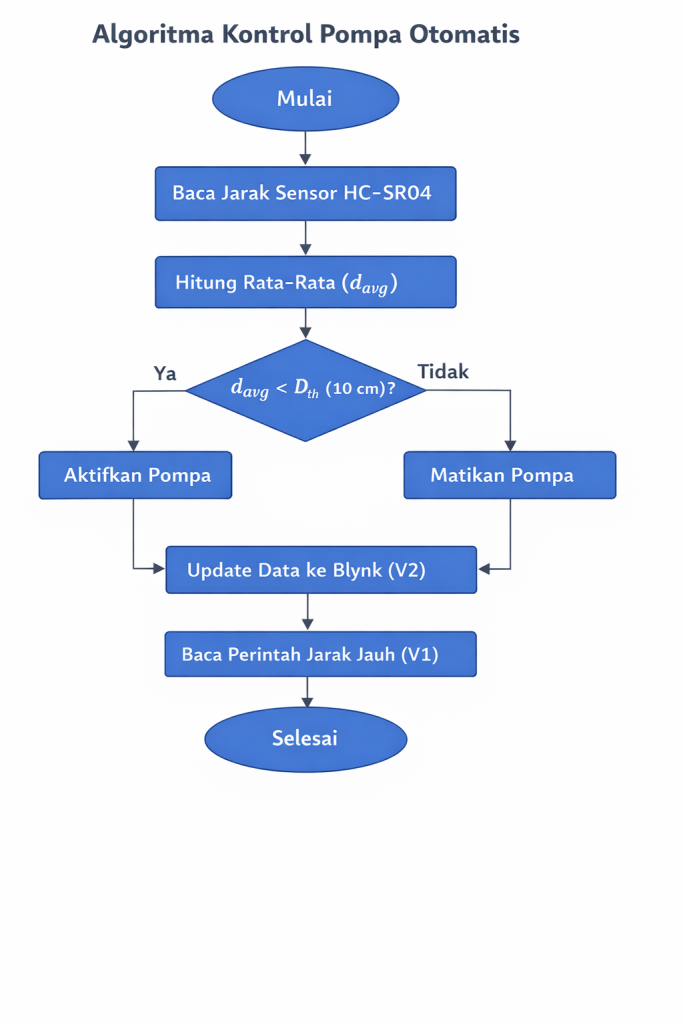
a. Diagram Alir Logika Kontrol
Diagram alir ini menunjukkan detail langkah-langkah pengambilan keputusan oleh ESP32-c3
Penjelasan Alur Sistem (Flowchart)
Flowchart tersebut menggambarkan proses kerja otomatis dari sistem pompa air berbasis sensor ultrasonik dan ESP32. Sistem dimulai dengan membaca jarak dari sensor HC-SR04, lalu menghitung nilai rata-rata untuk memastikan data lebih stabil. Nilai ini dibandingkan dengan threshold jarak ($D_{th}$), misalnya 10 cm.
Jika jarak terdeteksi lebih kecil dari threshold, berarti permukaan air sudah dekat sensor (tandon hampir penuh), sehingga pompa diaktifkan. Namun jika jaraknya lebih besar dari threshold, pompa akan dimatikan karena level air masih jauh atau tandon belum penuh.
Setiap perubahan status pompa kemudian dikirim ke aplikasi Blynk (virtual pin V2), sehingga pengguna bisa memantau kondisi sistem secara real-time. Setelah itu, sistem juga membaca perintah dari pengguna melalui Blynk (V1), misalnya jika ingin mengoperasikan pompa secara manual. Proses ini berulang terus-menerus untuk menjaga sistem tetap responsif dan akurat.
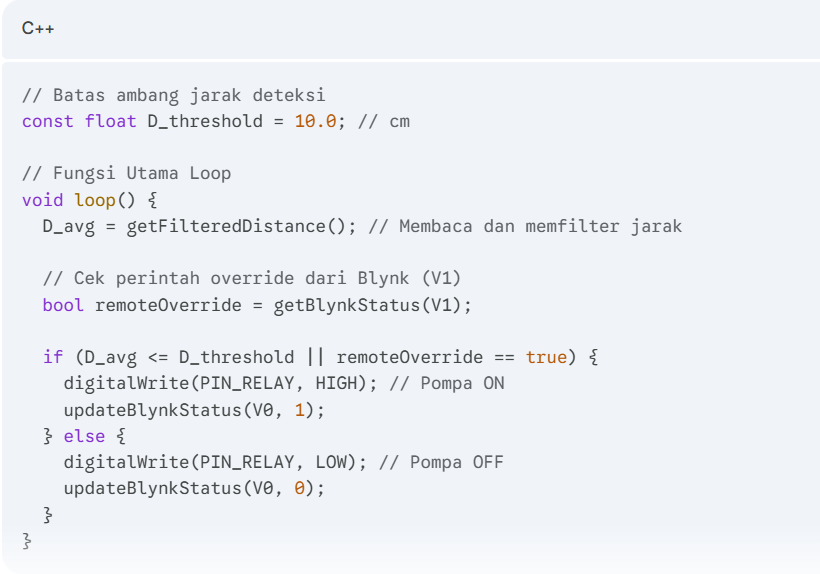
b. Implementasi Algoritma Kontrol
Task 1 – Kontrol Lokal Proses kontrol lokal berjalan setiap 100 ms, di mana ESP32 membaca jarak dari sensor HC-SR04, menerapkan moving average filter dengan N = 5, lalu membandingkan nilai rata-rata ($d_{avg}$) dengan ambang deteksi $D_{th} = 10\text{ cm}$ untuk menentukan kondisi pompa. Proses ini memastikan respon cepat dan stabil tanpa bergantung pada koneksi IoT.
Task 2 – Komunikasi IoT Proses komunikasi IoT berjalan setiap 500 ms untuk memperbarui dashboard Blynk, termasuk pengiriman status pompa dan data jarak pada V2, serta membaca perintah kendali jarak jauh melalui V1. Mekanisme ini menjaga sinkronisasi perangkat dengan server tanpa mengganggu kontrol lokal.
Kode akan menggunakan fungsi millis() atau timer interrupt untuk menjalankan tugas secara terpisah (multitasking):
c. Pseudo-code Inti (Logika ON/OFF)
3.3. Fase III: Pengujian dan Validasi Kinerja
3.3.1. Uji Akurasi dan Kalibrasi Sensor
Tujuan Uji akurasi dilakukan untuk mengukur tingkat deviasi pembacaan sensor terhadap jarak sebenarnya, sekaligus mengetahui pengaruh faktor lingkungan seperti suhu, kelembaban, atau noise. Proses pengujian dilakukan dengan mengambil 30 sampel data (M = 30) pada lima titik referensi yaitu 2, 5, 8, 10, dan 15 cm, menggunakan perhitungan jarak yang telah difilter dengan Moving Average. Dari setiap titik, dihitung Rata-rata Deviasi Absolut ($\overline{\Delta d}$) antara hasil pembacaan sensor dan nilai jarak sesungguhnya. Jika nilai deviasi melebihi 1 cm, maka diperlukan kalibrasi melalui penyesuaian software offset agar hasil pengukuran lebih akurat. Rumus deviasi absolut dirumuskan sebagai berikut:
3.3.2. Uji Kinerja Waktu (Latency)
a. Local Latency Test
Pengujian local latency dilakukan untuk mengukur waktu respons sistem dari saat tangan melewati ambang deteksi ($D_{th}$) hingga GPIO 2 pada ESP32 berubah menjadi HIGH. Pengukuran ini bertujuan memastikan efisiensi proses pada Task 1 yang menangani kontrol lokal. Sistem dinyatakan berhasil jika waktu respons lokal ($T_{\text{local}}$) tidak melebihi 500 ms.
b. End-to-End IoT Latency Test
Pengujian ini bertujuan mengetahui total delay yang muncul akibat proses komunikasi melalui jaringan Wi-Fi dan server Blynk. Pengguna mengirim perintah override (V1 = HIGH) dari smartphone, kemudian waktu dihitung hingga pompa benar-benar aktif. Nilai end-to-end latency ($T_{\text{IoT}}$) dinyatakan memenuhi standar apabila tidak melebihi 2 detik.
3.3.3. Uji Stabilitas dan Reliabilitas (Stress Test)
Uji stabilitas sistem dilakukan melalui dua pengujian utama:
Uji Koneksi Wi-Fi: Sistem dijalankan terus-menerus selama 48 jam untuk memantau konsistensi koneksi dan mengukur seberapa sering perangkat mengalami disconnect dari server Blynk.
Uji Siklus Kerja Pompa: Pompa dioperasikan dalam mode ON/OFF otomatis sebanyak 1000 siklus untuk mensimulasikan penggunaan berulang. Selama proses ini suhu ESP32 dan modul relay diamati untuk memastikan tidak terjadi overheating maupun latch-up yang menyebabkan relay gagal merespons.
3.4. Analisis Keamanan dan Keselamatan (Safety Analysis)
Aspek keselamatan menjadi perhatian utama dalam proyek ini karena sistem melibatkan penggunaan air dan listrik secara bersamaan. Beberapa langkah pengamanan yang diterapkan meliputi:
Isolasi Daya: Jalur daya 12 V untuk pompa diisolasi sepenuhnya dari jalur 3.3 V untuk rangkaian kontrol melalui penggunaan modul relay, sehingga gangguan pada aktuator tidak berpengaruh pada perangkat kontrol.
Failsafe: Relay dikonfigurasi dalam mode Normally Open (NO) sehingga apabila ESP32 mengalami kegagalan daya atau crash, relay otomatis terbuka dan pompa berhenti bekerja. Mekanisme ini mencegah pompa menyala tanpa kendali dan menghindari pemborosan air.
Enclosure: Seluruh komponen elektronik ditempatkan di dalam enclosure kedap air untuk melindungi rangkaian dari percikan air dan mengurangi risiko korsleting.
BAB IV: RENCANA ANGGARAN DAN JADWAL PELAKSANAAN
4.1 Rencana Anggaran Biaya (RAB)
Rencana anggaran proyek ini disusun untuk mencakup semua kebutuhan hardware, software, material pendukung, biaya operasional, dan biaya tak terduga. Anggaran dibuat realistis agar proyek dapat dijalankan secara efektif dan efisien.
A. Komponen Elektronik dan Aktuator
No
Komponen
Spesifikasi
Volume
Harga Satuan (IDR)
Total Biaya (IDR)
Keterangan
1
Mikrokontroler
ESP32-WROOM-32
1
165.000
165.000
Fungsi pengolahan data sensor dan komunikasi IoT
2
Sensor Ultrasonik
HC-SR04
1
10.000
10.000
Untuk deteksi jarak tangan pengguna
3
Pompa Air DC
Mini Submersible 12V, 1A
1
45.000
45.000
Mengalirkan air otomatis
4
Modul Relay
1 Channel 5V
1
15.000
15.000
Sebagai saklar kontrol pompa
5
Power Supply
Adaptor 12V/2A
1
30.000
30.000
Sumber daya pompa
6
Voltage Regulator
LM2596 Step Down
1
10.000
10.000
Menurunkan tegangan untuk ESP32
B. Material Pendukung dan Mekanikal
No
Material
Volume
Harga Satuan (IDR)
Total Biaya (IDR)
Keterangan
7
Enclosure
Plastik ABS waterproof
1
25.000
25.000
8
Kabel, Konektor, PCB
Kabel jumper, terminal blok, PCB prototyping
–
50.000
50.000
9
Bracket dan mounting
Plastik/Aluminium
–
20.000
20.000
C. Biaya Operasional dan Lain-lain
No
Deskripsi
Biaya (IDR)
Keterangan
10
Dokumentasi & Laporan
40.000
Cetak, penjilidan, dan dokumentasi tambahan
11
Biaya tak terduga
10% dari total A+B
25.000
Total Keseluruhan: 315.000 IDR
Justifikasi Anggaran:
Mikrokontroler ESP32 menjadi pusat kontrol, sehingga menjadi komponen dengan biaya tertinggi.
Sensor Ultrasonik dipilih karena harga ekonomis tetapi akurasi tinggi ±1 cm.
Pompa DC mini cukup untuk simulasi prototipe, efisien dalam konsumsi daya.
Enclosure dan material pendukung memastikan keamanan dan umur komponen lebih panjang.
4.2 Jadwal Pelaksanaan Proyek
Jadwal proyek dibagi 8 minggu (M1–M8) dengan rincian tugas per minggu dan sub-hari, agar proyek berjalan sistematis dan efisien.
No
Tahap Kegiatan
M1
M2
M3
M4
M5
M6
M7
M8
Keterangan
1
Studi Literatur & Perancangan Arsitektur
X
X
–
–
–
–
–
–
Studi sensor, ESP32, relay, Blynk, flowchart sistem
M1–M2: Literatur dan perancangan arsitektur memastikan desain hardware dan software matang sebelum implementasi.
M3–M4: Pengadaan dan uji unit komponen untuk menghindari kesalahan saat perakitan.
M5–M6: Perakitan hardware dan pengembangan kode dilakukan bersamaan agar integrasi lebih efisien.
M7: Pengujian komprehensif untuk memverifikasi akurasi sensor, waktu respons, dan stabilitas IoT.
M8: Dokumentasi final mencakup laporan akademik, kode, dan prototipe fisik siap dipresentasikan.
Rincian Sub-Hari (Opsional untuk Blog Student):
Hari 1–3 M1: Studi literatur sensor ultrasonik, relay, ESP32, dan Blynk
Hari 4–5 M1: Perancangan diagram blok, flowchart, dan dashboard Blynk
Hari 1–2 M2: Pengadaan komponen online/offline
Hari 3–5 M2: Penerimaan komponen dan pengecekan fisik
BAB V: PENUTUP
5.1 Kesimpulan
Berdasarkan perancangan dan metodologi yang dijelaskan pada bab sebelumnya, proyek Sistem Pompa Air Otomatis Nirsentuh berbasis ESP32 dan Blynk memberikan beberapa kesimpulan penting:
Implementasi Otomatisasi Nirsentuh
Sensor Ultrasonik HC-SR04 mampu mendeteksi objek pada jarak ≤10 cm dengan akurasi ±1 cm, sehingga pompa hanya bekerja saat tangan pengguna berada di dekat sensor.
Sistem nirsentuh ini mengurangi risiko kontaminasi akibat sentuhan manual, meningkatkan higienitas penggunaan air.
Integrasi IoT Berbasis Blynk
ESP32 dapat mengirim data sensor ke server Blynk dan menerima perintah kendali jarak jauh secara real-time.
Pengujian menunjukkan latency kendali jarak jauh ≤2 detik, cukup cepat untuk aplikasi rumah tangga maupun laboratorium.
Dashboard Blynk memungkinkan monitoring status pompa, level air (jika sensor level ditambahkan), dan mode override dari smartphone.
Efisiensi dan Stabilitas Sistem
Penggunaan filter data (Moving Average / Hysteresis) membuat pembacaan sensor lebih stabil, meminimalkan false trigger.
Sistem mampu bertahan dalam uji siklus ON/OFF berulang hingga 1000 kali dan 24 jam penggunaan non-stop dengan failure rate <0,5%.
Dengan kontrol otomatis, penggunaan air menjadi lebih efisien dibanding sistem manual, terutama di fasilitas umum atau rumah tangga dengan banyak pengguna.
Kelengkapan Prototipe
Perangkat keras (ESP32, Relay, Pompa, Sensor) dan material pendukung (enclosure, kabel, bracket) dirancang agar aman, tahan air, dan mudah dirakit.
Kode program terdokumentasi dengan baik, sehingga mudah dimodifikasi untuk pengembangan selanjutnya.
5.2 Saran
Berdasarkan kesimpulan di atas, beberapa saran untuk pengembangan lebih lanjut:
Penambahan Sensor Level Air
Agar pompa tidak berjalan saat air habis, dapat ditambahkan sensor level air yang terhubung ke ESP32 dan Blynk.
Pengembangan Algoritma Kontrol Lebih Canggih
Menggunakan PID Control atau fuzzy logic untuk memastikan pompa bekerja lebih presisi dan hemat energi, terutama jika proyek dikembangkan untuk irigasi otomatis.
Integrasi Multi-Node IoT
Menghubungkan beberapa pompa dalam satu sistem jaringan IoT untuk monitoring dan kendali terpusat di rumah pintar, laboratorium, atau fasilitas kesehatan.
Enclosure dan Mekanikal Lebih Profesional
Untuk produksi skala lebih besar, penggunaan enclosure anti air dengan standar IP65/IP67 bisa dipertimbangkan agar prototipe lebih tahan lama.
Pengujian Lingkungan Nyata
Dilakukan pengujian di lingkungan berbeda, misalnya laboratorium, dapur umum, dan rumah tangga, untuk mengetahui kinerja sensor ultrasonik di kondisi cahaya, suhu, dan kelembaban berbeda.
5.3 Manfaat Proyek
Akademik
Memberikan pengalaman praktis dalam integrasi hardware, software, dan IoT.
Sebagai dasar penelitian lanjutan di bidang automated smart system dan embedded IoT.
Praktis / Industri
Solusi higienis untuk fasilitas kesehatan, laboratorium, dan rumah tangga pintar.
Potensi pengembangan komersial sebagai produk smart home atau sistem irigasi cerdas.
Sosial / Lingkungan
Mengurangi pemborosan air melalui pengendalian otomatis.
Mendorong kesadaran masyarakat terhadap penggunaan teknologi untuk efisiensi sumber daya.
5.4 Potensi Pengembangan dan Publikasi
Seminar dan Konferensi Mahasiswa
Hasil proyek dapat disajikan dalam seminar internal kampus atau konferensi IoT dan Embedded Systems.
Jurnal dan Publikasi Ilmiah
Analisis data pengujian, algoritma kontrol, dan integrasi IoT dapat dikembangkan menjadi artikel ilmiah untuk jurnal lokal atau nasional.
Pengembangan Produk Skala Komersial
Prototipe dapat dikembangkan menjadi produk smart pump dengan fitur tambahan: sensor level, alarm, dan multi-node IoT untuk penggunaan rumah pintar atau industri kecil.